23.05.2017
Materials that can be moved with light are rapidly developing. TUT’s Smart Photonic Materials research group’s research on an optical gripper, resembling a Venus flytrap, was published in the Nature Communications journal. The research opens new venues in the development of soft microbots.
The Venus flytrap is a carnivorous plant that uses its leaves to catch small insects. So far, the optical gripper developed by TUT’s Smart Photonic Materials research group has come the closest to matching this natural marvel in intelligence. This soft robot is the first autonomous light-controlled device that can recognise objects.
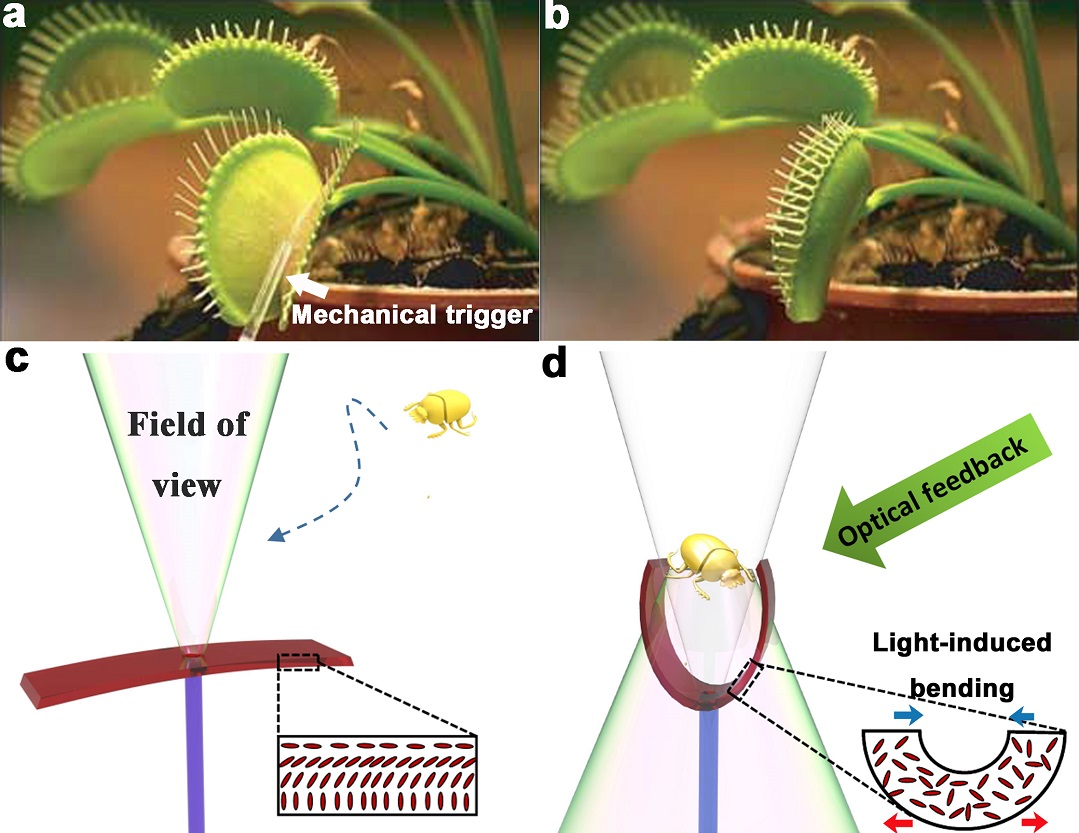
Schematic drawing of the light-triggered artificial flytrap at its open stage, when no object has entered its field of view. No light is back-reflected to the LCE actuator, which remains in the open stage. d, The flytrap closes when an object enters its field of view and causes optical feedback to the LCE actuator. Light-induced bending of the LCE leads to closure action, thus capturing the object.
“The Venus flytrap plant stands still with its leaves wide open, waiting for an insect to land there. It knows whether the thing sitting on its surface is an insect or a speck of dust, and only closes when it is an insect. That’s what we are trying to do with our ‘flytrap’,” says Arri Priimägi, leader of the Smart Photonic Materials group from TUT’s Laboratory of Chemistry and Bioengineering.
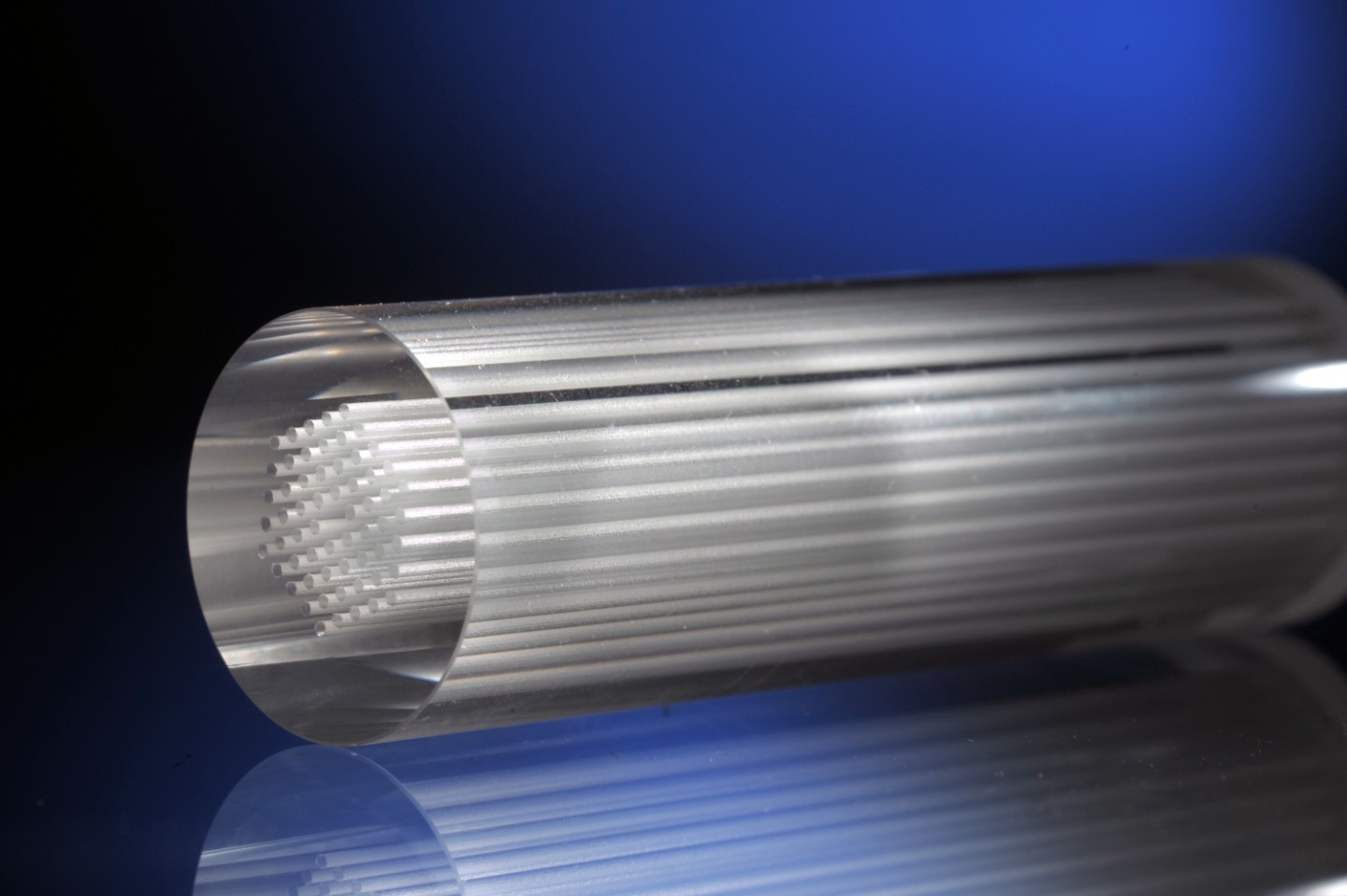
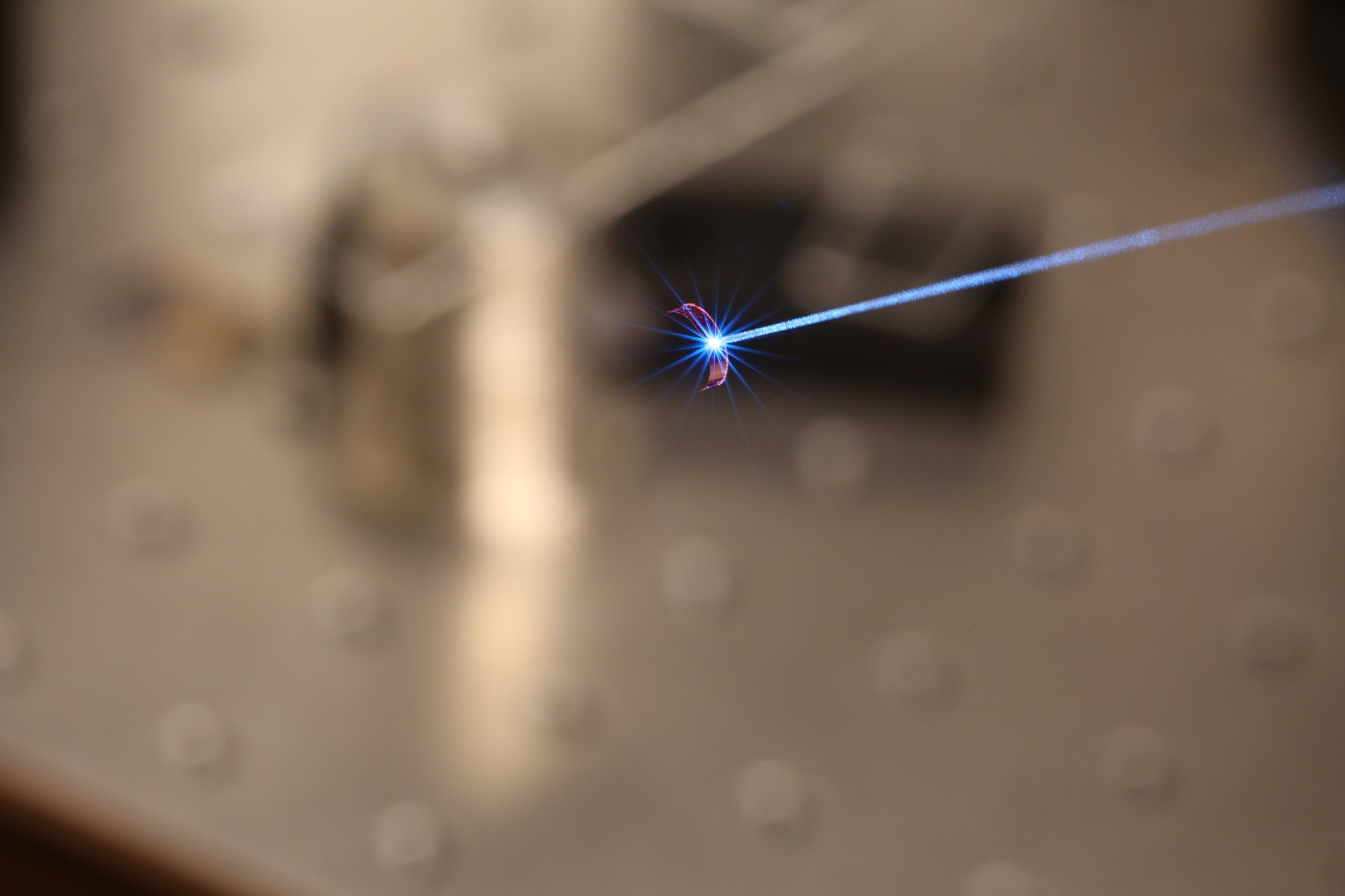
Imitating a flytrap is made possible by liquid crystal elastomers whose shape can be manipulated with light. The optical flytrap described in the newly-published research is a small elastomer strip, less than one centimetre in length. The strip is glued onto optical fibre into which blue light is coupled. When an object in the field of view of the flytrap reflects light onto the elastomer surface, the strip bends itself around the object, capturing it like a flytrap. This allows different objects to be recognised based on their light reflection, and to move them in a controlled way. The flytrap’s lifting power is hundreds of times its body weight.
“’Let’s make it smart’ has been our motto. We are currently investigating ways of making the elastomer even smarter. The next thing we would like to teach our flytrap is colour recognition.”
Light-controlled elastomers are a new approach to soft robotics, and there are constantly new things to consider in terms of both fundamental research and potential applications.

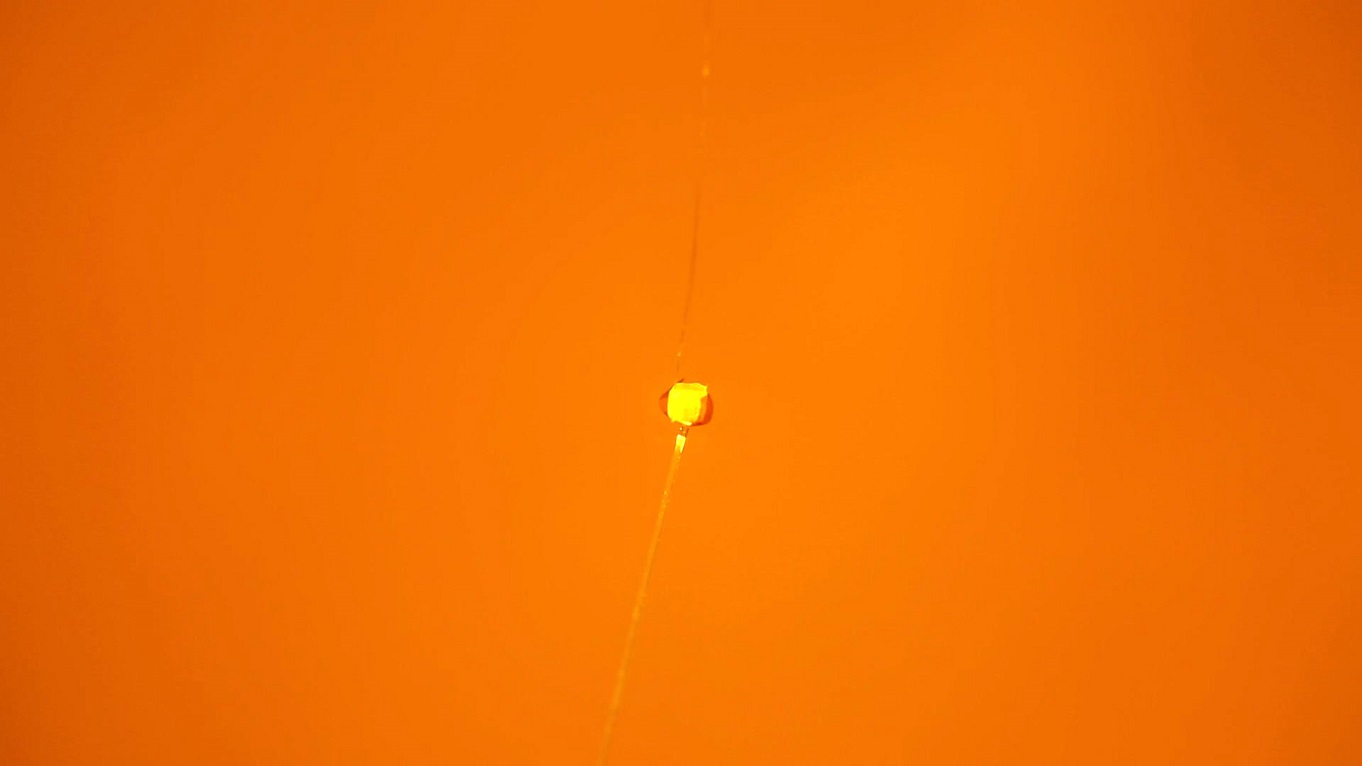
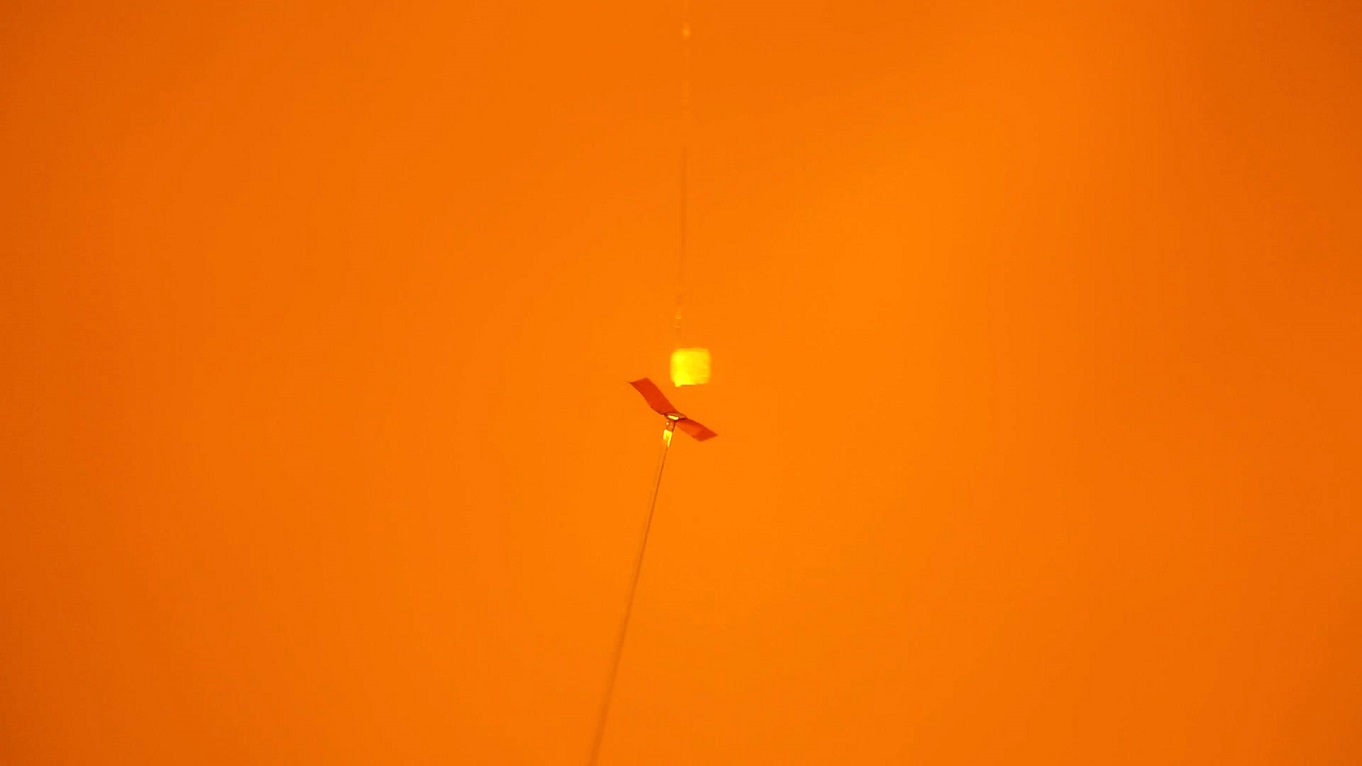

Series of optical images showing a snapping motion capturing a piece of rice falling down to the device.
“For instance, the artificial flytrap could potentially be applied in ‘quality control’, i.e., it could automatically identify and pick out small components with defects from a production line. First, however, we have to learn the possibilities and limitations of our device,” says Priimägi.
The ERC-funded research will be published on 23 May 2017 in the highly regarded Nature Communications journal. Nature Communications is an open publication, and the paper can be found at http://nature.com/articles/doi:10.1038/ncomms15546. Also included are videos of the artificial flytrap in action.